In drawing this I experienced a small fraction of the hell it would be to actually try building one.
Transcript
LOG 5.2: Electrician Worms
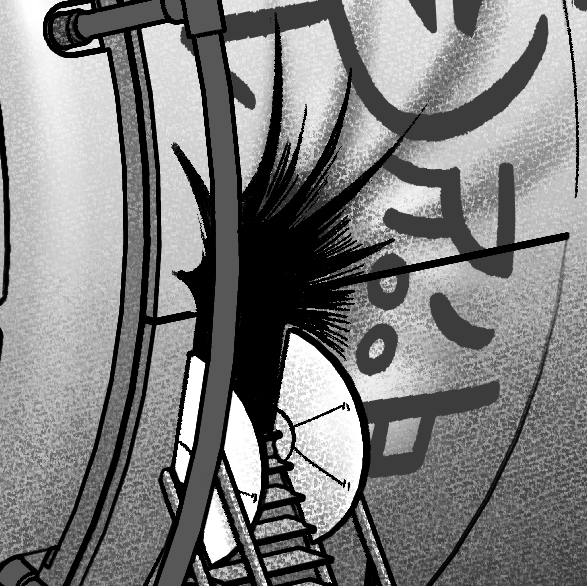
Image: A segmented worm-like robot with a soft plastic exterior, thin retractable ribbon-like legs, and a cone shaped face made of a ring of flooded thin metallic tool arms. It has two camera arms that it holds up like eye stalks.
Electrician worms are soft-bodied robots that contain sophisticated, flexible pneumatic interiors. Much like modular frontloaders, they can either be remote controlled, or given a program to complete with their simple onboard AI. They are often used to repair or delicately dismantle electronic parts hidden in tight spaces on spacecraft, and come in a variety of sizes (although the smallest ones have much more limited equipment and self-governance). The exact set of tools found in their manipulator set can vary, and some worms are specialized for tasks including light welding, metal cutting, and drilling.
-
Cameras
-
wire stripper
-
heavy manipulator
-
soldering iron
-
soldering paste printhead
-
wire cutter
-
fine manipulator
-
drill
-
soldering paste storage
-
CPU
-
batteries
-
retractable legs
-
pneumatic segments
-
retroflective polymer skin
-
refueling ports
Leg Components:
Image: A cross section of one of the ribbon-like legs shows it contains thin cables attached to the inside of its flexible flat plastic casing.
-
electrostatic adhesive pad
-
cable tendons
Cables pull on the inside of the thin leg casing, flexing it to grip surfaces without adding bulk.
Segment Locomotion:
-
Turning
-
Twisting
-
Extension
The pneumatic segments push against each other, while intersegmental servos twist and push segments to produce a wide range of motion for navigating tight spaces.